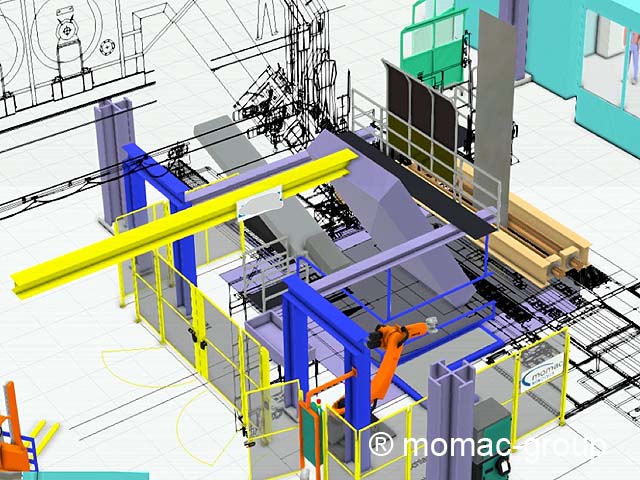
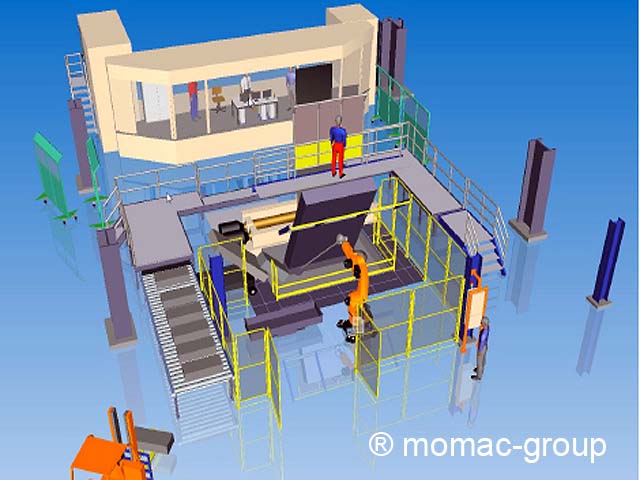
By means of our simulation programs we plan your robot cells / robot systems true to the original.
With special programs for the 3D simulation of the processes in your production, we can reliably simulate, plan and optimize the interaction of the individual robots and the linking to your production machines as well as the achievable cycle times.
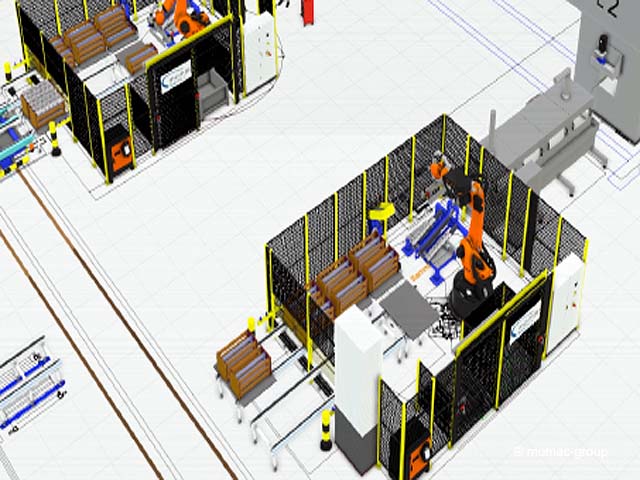
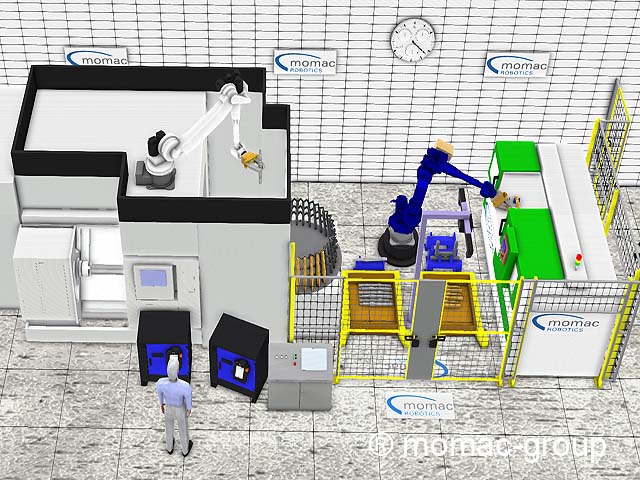
We dispose of software for the plant design by means of which we can compare different layouts, concepts and robot tasks incl. grippers, conveyors, protective fences.
Collision detection, accessibility checks and the visualization of the robot movement can thus be carried out clearly in 3D.
The offline-programmed robot motion sequences are displayed in real time and are evaluated and optimized with regard to their cycle time. Using the virtual robot controller, the robots can be programmed directly without intervening again in the process sequence.
The robot programs created in this way can be transferred directly into the robot system and “used productively”. Production shutdowns can be kept as short as possible.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}