You are planning
- to modify your existing robot system and need for this purpose new robot grippers?
- to grip new components with your robot cell or to improve the functionality of the gripper technique?
On basis of our many years of experience with various robot applications, we support you regarding
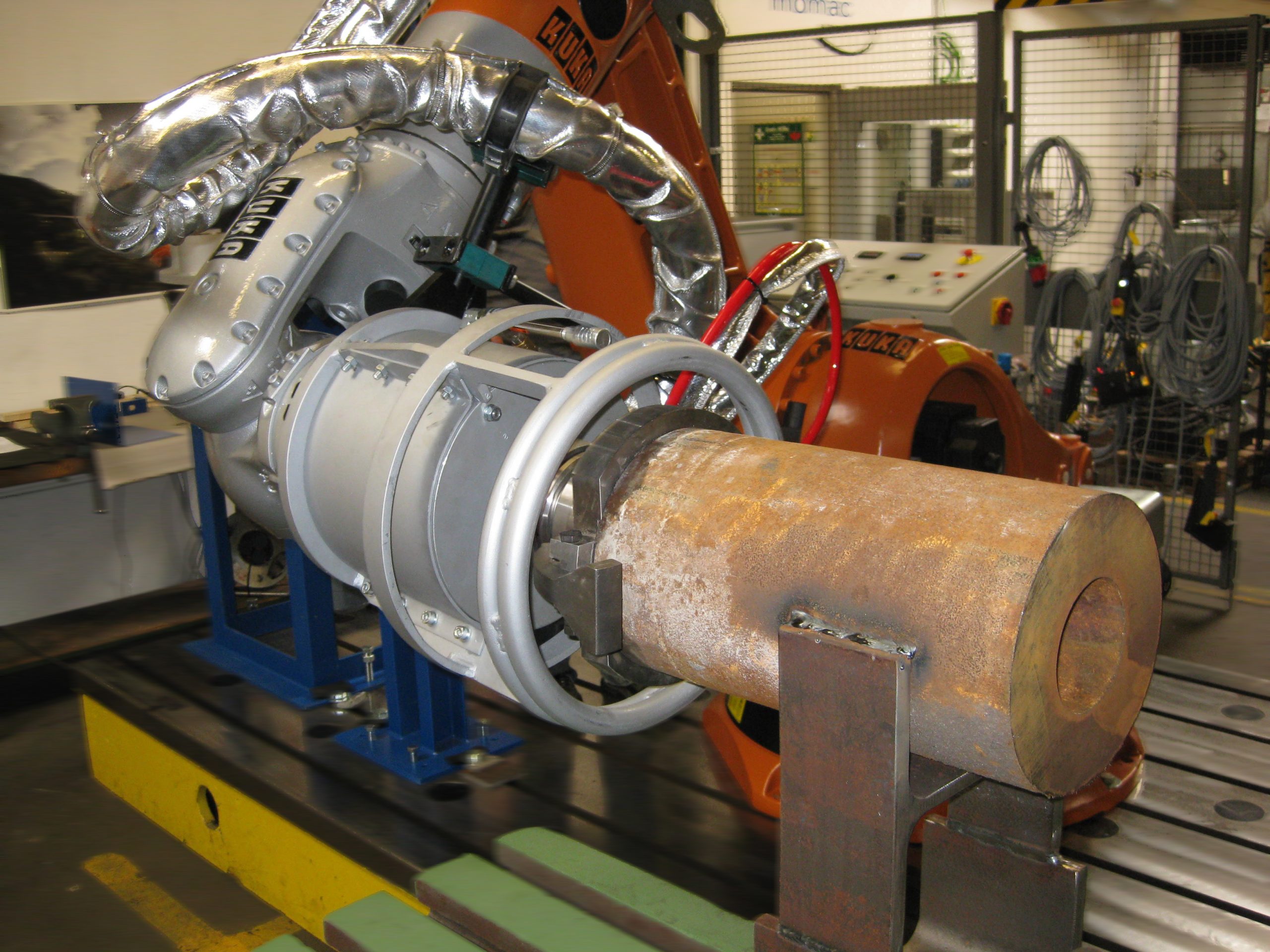
- feasibility studies on robot grippers for gripping special components with robots
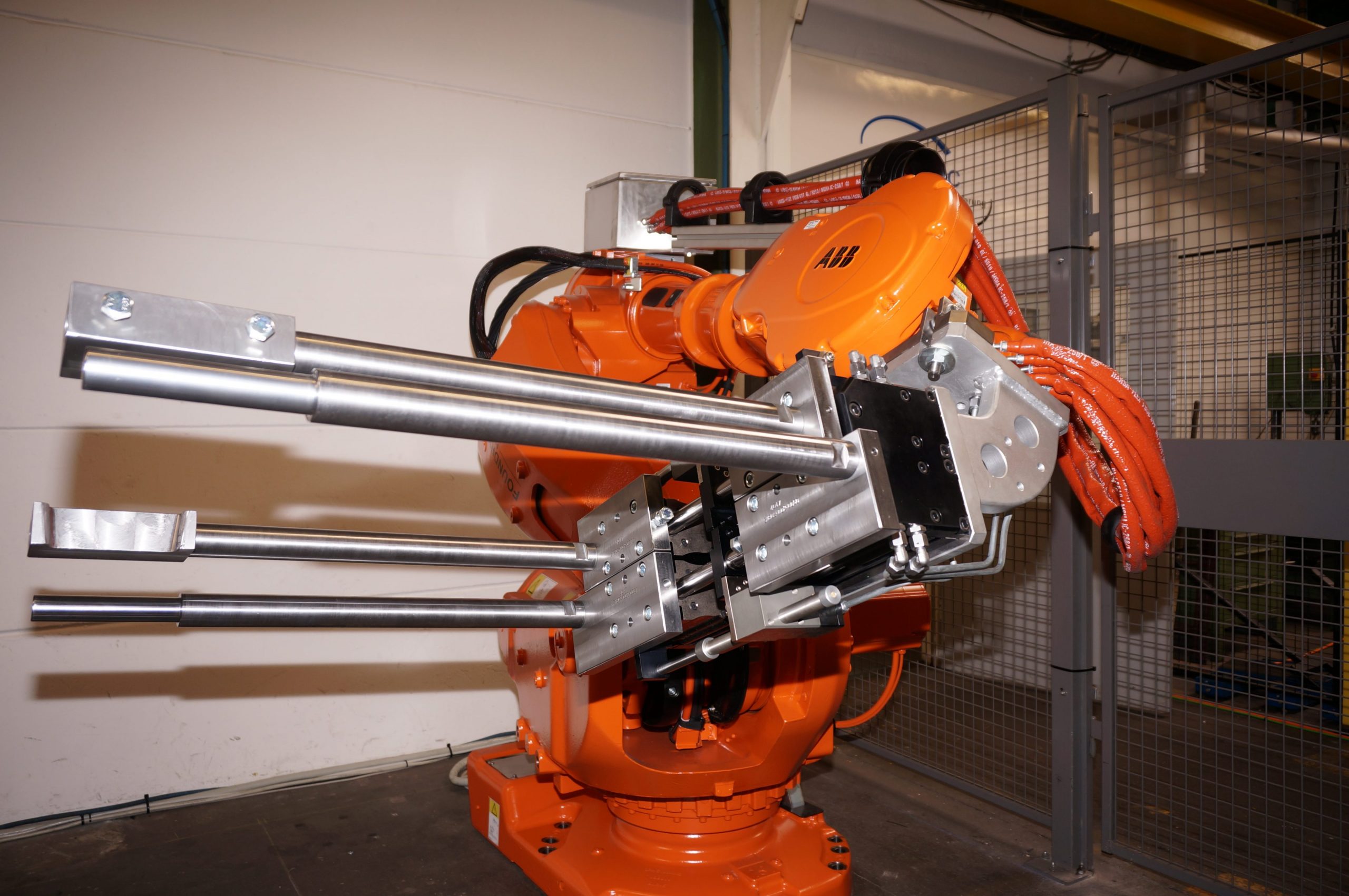
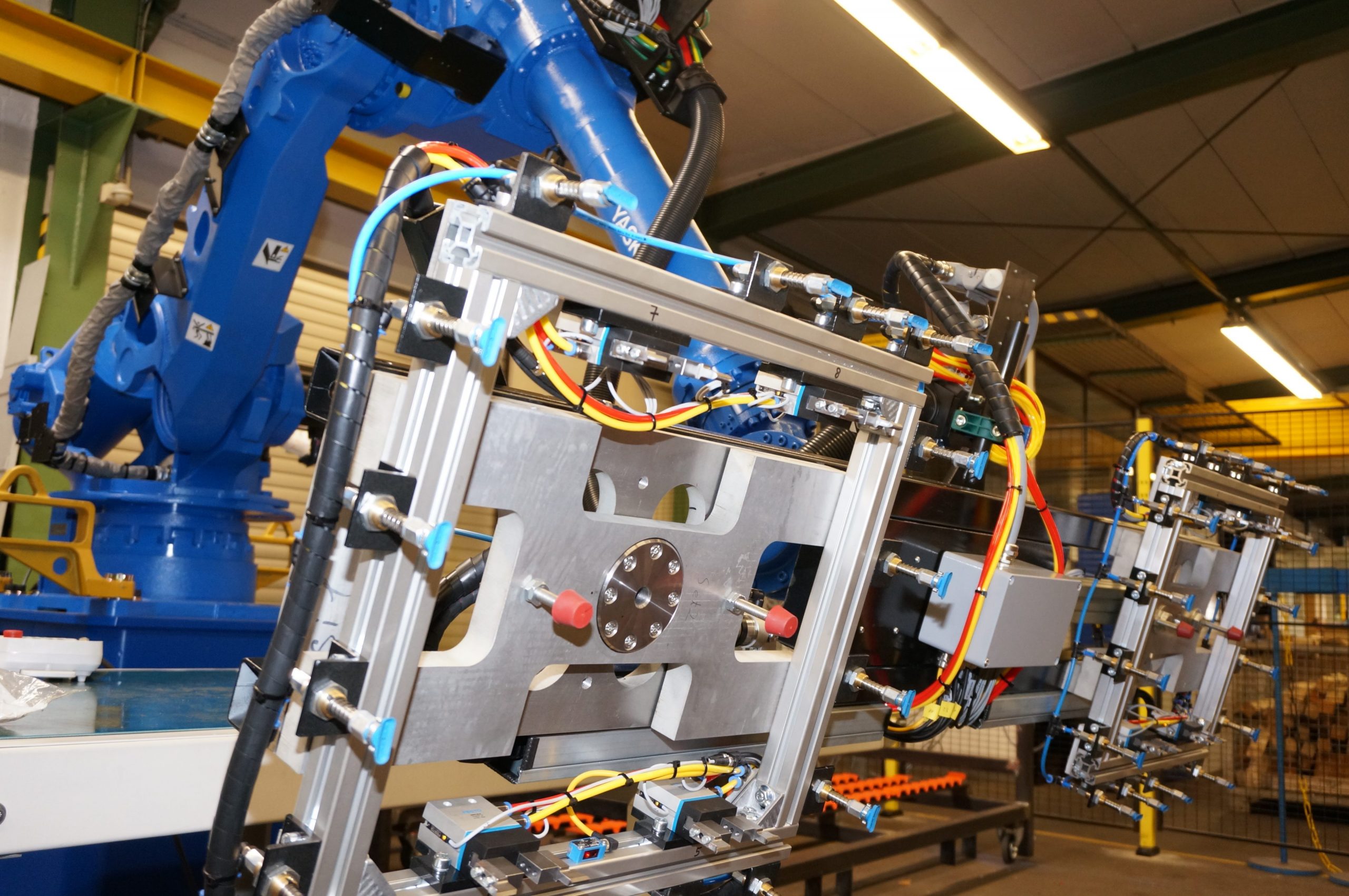
- the construction of robot grippers, from the first design to the simulation of complex gripping situations with special robot grippers
- the manufacturing of new robot grippers adapted to the gripping situation
- the modification of existing robot grippers to meet new gripper requirements
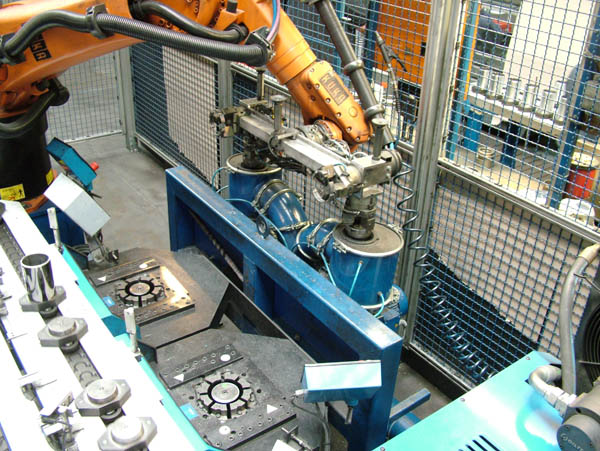
- the adaptation of the new robot grippers to your robot system and
- the programming / commissioning of the new robot grippers



{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}